|
|
Umsetzung
Teil 1: GIS-Daten
Diesen Teil der Umsetzung werde ich sehr kurz halten, da alles Nötige hierzu bereits in Kapitel "Hightmap aus Punktwolken -> Anwendung" beschrieben ist.
Wir haben genau den dort beschriebenen Code als Anfang unseres Programms verwendet,
wobei wir jedoch den Output als Tiff ausgeblendet haben.
Teil 2: Konfiguration
Zuerst noch eine Anmerkung:
Für unser Programm haben wir uns auf das Tempelgebiet beschränkt, dies kommt daher, dass
der Rest des Gebiets, zu dem Daten vorliegen, keinerlei Erhöhungen oder ähnliches bietet
und somit der wesentlich erhöhte Rechenaufwand nicht zweckmäßig ist.
Nun kommen wir zum grafischen Teil des Programms. Wir sind momentan auf folgendem Stand:
Die erforderlichen GIS-Daten wurden eingelesen und alle fehlenden Höhen sind berechnet.
D.h. das Array buffer16[] ist vollständig mit Höhen gefüllt.
Nun müssen wir diese Höhen in die Engine einbringen.
Wir haben zuerst den Ansatz verfolgt den Zwischenschritt über eine Heightmap zu gehen, da Irrlicht in der Größe
der einzulesenden Heightmap sehr beschränkt ist (das Maximum, das vollständig funktioniert hat, was 300x300 px)
ist die Auflösung in Relation zur Terraingröße unzureichend.
Das ganze wird durch folgenden Screenshot verdeutlicht:
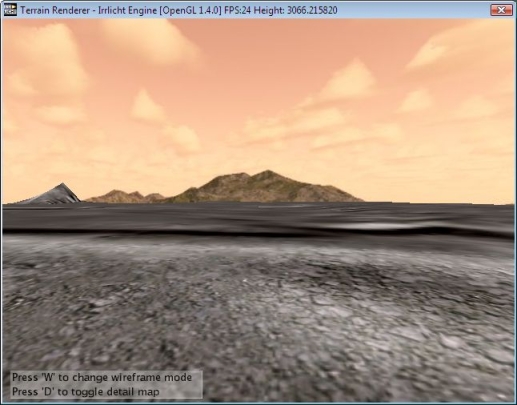
Man erkennt, dass in dieser Skalierung die Höhen nicht wirklich sichtbar sind und das Gelände auch nicht richtig skaliert ist.
Das Problem ergibt sich daraus, dass eine genaue Heightmap für das Gebiet eine Größe von 24000 x 21000 px bzw nur für das
Tempelgebiet 8000 x 8000 px hat. Wenn man diese Heightmap nun zuerst auf 200 x 200 px runterrechnen muss und
anschließend wieder auf eine einigermaßen realistische Dimension hochskalieren muss, sind
weiterhin 70% der Daten verloren.
Für große Gelände ab ca. 1000 x 1000 px empfiehlt sich immer die Lösung, die wir gewählt haben, zu der ich gleich kommen werde.
Zunächst noch ein weiteres Defizit von Irrlicht, das man auf obigen Screenshot gut erkennen kann:
Das LOD ist wesentlich zu grob (man betrachte den Berg links im Bild)! Soweit ich weiß, arbeiten die Entwickler bereits an einem dynamischen LOD,
was auch sehr wünschenswert ist. Das ist ein weiteres Problem, warum es nicht sinnvoll ist, das ganze Terrain auf einmal zu rendern
bzw. die Sichtweite zu groß zu wählen. Niemand möchte Berge und andere Details, die von einem zum nächsten
Moment ihre Form komplett von einer Ecke zu 5 Ecken ändern. Um dieses Problem zu lösen,
haben wir uns für die Lösung "Nebel" entschieden, was wiederrum andere Probleme aufwirft, dazu später mehr.
Nun zur Visualisierung großen Terrains.
Wir haben zunächst einmal ein Startfenster konstruiert, welches den Benutzer diverse Auswahlmöglichkeiten erlaubt.
MyEventReceiver receiver;
IrrlichtDevice *device;
video::E_DRIVER_TYPE drivertype = video::EDT_OPENGL;
bool fulscreen = false;
// setup
device = createDevice(drivertype, core::dimension2d<s32>(500, 300), 32,
fulscreen, false, false, 0);
video::IVideoDriver* driver = device->getVideoDriver();
gui::IGUIEnvironment* guienv = device->getGUIEnvironment();
ITimer* timer = device->getTimer();
gui::IGUIFont* font = guienv->getFont("media/cityblueprint.bmp");
guienv->getSkin()->setFont(font);
Dies ist die Initialisierung für Irrlicht. Es wird u.a. der Grafiktreiber und die Fenstergröße festgelegt.
Desweiteren definieren wir, wie in jedem Irrlicht-Programm zuerst einmal driver, guienv und timer. Zusätzlich übergeben
wir der GUI noch eine eigene Schriftart.
device->setWindowCaption(L"Angkor
Project");
guienv->addStaticText(L"Cambodia", core::rect<s32>(20,20,250,40),
false);
guienv->addStaticText(L"created: 28.07.2008", core::rect<s32>(20,40,250,60),
false);
guienv->addStaticText(L"author: Nithi und Jan", core::rect<s32>(20,60,250,80),
false);
gui::IGUIButton *drtbutton = guienv->addButton(core::rect<s32>(170,70,330,100),
0, 101, L"OpenGl");
gui::IGUIButton *fscrbutton = guienv->addButton(core::rect<s32>(170,110,330,140),
0, 101, L"WINDOW");
gui::IGUIButton *contbutton = guienv->addButton(core::rect<s32>(170,150,330,180),
0, 101, L"CONTINUE");
gui::IGUIButton *extbutton = guienv->addButton(core::rect<s32>(170,190,330,220),
0, 101, L"EXIT");
bool exit = true;
drivertype = video::EDT_OPENGL;
u32 pause = 0;
Das eben erwähnte Startfenster wird hier nun eingerichtet. Zuerst setzen wir den Titel des Fensters. Danach haben wir etwas Text eingefügt, so dass man weiß, welches Objekt gestartet ist.
addStaticText() nimmt eigentlich sieben Argumente, wir ändern nur drei und die restlichen vier
bleiben somit auf dem Standard.
Das erste Argument ist der Text, der angezeigt werden soll. Man kann dies später mit SetText() wieder abändern.
Das zweite Argument ist die Position des Textes, welche mit Hilfe eines Rechtecks übergeben wird. Um das Rechteck zu setzten, gibt man die obere linke Ecke und die rechte untere an.
Man muss nur beachten, dass der Ursprung des zweidimensionalen Koordinatensystems in der oberen linken Ecke des Fensters liegt.
Das dritte Argument ist border, den man true oder false setzen kann. Hiermit entscheidet man, ob der
Text einen 3D Rahmen hat.
Die letzten vier Argumente sind: wordWrap (Zeilenumbruch Standard="true"), parent (Standard=0), id (Standard= -1), fillBackground (Standard="false")
Anschließend fügen wir die Buttons für die Auswahlmöglichkeiten hinzu.
addButton() nimmt fünf Argumente.
Das erste Argument rectangel bestimmt wie eben die Position und Größe des Buttons
Das zweite und dritte Argument sind parent und id, wobei parent auf NULL gesetzt wird. Allerdings übergeben wir eine id, um später besser darauf zugreifen zu können.
Das vierte Argument übergibt den Text, der auf dem Button stehen soll.
Das letzte Argument, welches wir nicht belegen, setzt den Text, der im Tooltip gezeigt wird, aber haben keine Tooltips gesetzt, weil die Buttons leicht zu verstehen sind.
while(device->run())
{
if(timer->getRealTime() > pause) pause = 0;
if(!pause)
{
if(drtbutton->isPressed())
{
pause = timer->getRealTime() + 300;
if(drivertype == video::EDT_OPENGL)
{
drivertype = video::EDT_DIRECT3D9;
drtbutton->setText(L"DirectX 9");
}
else
{
drivertype = video::EDT_OPENGL;
drtbutton->setText(L"OpenGl");
}
}
if(fscrbutton->isPressed())
{
pause = timer->getRealTime() + 500;
if(fulscreen)
{
fulscreen = false;
fscrbutton->setText(L"WINDOW");
}
else
{
fulscreen = true;
fscrbutton->setText(L"FULLSCREEN");
}
}
}
if(contbutton->isPressed())
{
exit = false;
device->closeDevice();
}
if(extbutton->isPressed())
{
exit = true;
device->closeDevice();
}
driver->beginScene(true, true, video::SColor(255,100,120,100));
guienv->drawAll();
driver->endScene();
}
device->drop();
if(exit) return 0;
In diesem Teil legen wir fest, was geschieht, wenn man die Buttons drückt. Das ganz geschieht natürlich während das device läuft,
also während das Fenster angezeigt wird. Die Abfrage, ob ein button gedrückt ist oder nicht, wird wesentlich erleichtert dank der Irrlicht-Klasse irr::gui::IGUIButton. Hierbei kann man
isPressed() abfragen.
Wenn man den contbutton drückt wird das nächste Fenster aufgerufen.
Nun beginnt die eigentliche Ausführung der Terrainvisualisierung.
device = createDevice(drivertype,
core::dimension2d<s32>(800, 600), 32, fulscreen, false, false, &receiver);
device->setWindowCaption(L"Angkor Project");
driver = device->getVideoDriver();
scene::ISceneManager* smgr = device->getSceneManager();
guienv = device->getGUIEnvironment();
font = guienv->getFont("media/cityblueprint.bmp");
guienv->getSkin()->setFont(font);
timer = device->getTimer();
// set attributes of terrain
s32 terrainWidth = (s32)(width);
s32 terrainHeight = (s32)(length);
s32 meshSize = 100;
f32 tileSize = 1;
core::vector3df terrainPos(0.0f, 0.0f, 0.0f);
// setup camera
MCameraFPS camera(smgr);
camera.setNearValue(0.1f);
camera.setFarValue(tileSize*meshSize/2);
camera.setPosition(core::vector3df(terrainWidth*tileSize/2, 0, terrainHeight*tileSize/2)
+ terrainPos);
// fog
driver->setFog(video::SColor(255,100,101,140), true, tileSize*meshSize/4,
tileSize*(meshSize-4)/2, 0.05f);
Die Rückgaben aus den Buttons, werden nun für das zweite Device übergeben. Und das Fenster wird, genau wie das auch beim ersten geschehen ist,
initialisiert. Um nicht die alten Werte und Einstellungen zu übernehmen, werden die Zeiger nocheinmal neu gesetzt.
Daran anschließend wird das Terrain eingerichtet. Die Höhe und Breite übernehmen wir so, wie wir es beim Einlesen der GIS-Daten gesetzt haben. Weil wir das auszulesende Gebiet verkleinert haben, gilt:
width=8000/r, height=8000/r
meshSize und tileSize sind die Eigenschaften, die für das Tiled Terrain wichtig sind. Was die Argumente beschreiben, zeigen die Variablennamen. terrainPos setzt den Nullpunkt des zukünftigen Terrains.
Danach initialisieren wir noch unsere Kamera, um diese zu verstehen, empfehle ich MCamera.h anzusehen, wie es im Source vorhanden ist. Im Grunde ist es nur die Irrlicht eigene Kamera, nur mit einigen Modifikationen, die z.B. ein 360° Blickfeld auch nach Oben und Unten ermöglicht.
Zuletzt habe ich noch den Nebel gesetzt, damit man das Berechnen der Tiles beschränken, indem man nicht alles auf einmal Rendern muss, sondern nur 10 Tiles um die Position der Kamera. Somit werden deutlich Ressourcen gespart und
die FPS ist wesentlich höher. Ein weiterer netter Nebeneffekt ist, dass das LOD wegfällt. Also kein nerviges und unschönes Popping des Geländes mehr.
Durch den Nebel ergibt sich allerdings ein neues Problem. Irrlicht kann Nebel und Skyboxen nicht vereinen und zeigt Nebel nur auf den Gegenständen, nicht aber vor den Skyboxen an. Dies ist
auch einfach zu erklären: OpenGL rechnet Nebel abhängig von der Entfernung des Gegenstandes einfach als eine prozedurale Vermischung der Nebelfarbe mit den Farben des Objekts.
Die Skybox lieg nun aber so weit entfernt, dass man entweder nur Nebel sehen könnte, wodurch man sich die Skybox natürlich sparen kann, oder eben die Skybox ohne Nebel. OpenGL entscheidet sich für die zweite Variante.
Eine Lösung dieses Problems werde ich in "Ausblick" vorschlagen.
// light
scene::ILightSceneNode* light = smgr->addLightSceneNode(0,
core::vector3df(0,0,0),
video::SColorf(255, 255, 255, 255), 1000.0f);
video::SLight ldata = light->getLightData();
ldata.AmbientColor = video::SColorf(0.2f,0.2f,0.2f);
ldata.DiffuseColor = video::SColorf(1.f,1.f,1.f);
ldata.Type = video::ELT_DIRECTIONAL;
ldata.Position = core::vector3df(-10.f,5.f,-5.f);
light->setLightData(ldata);
// create test scene node
scene::IAnimatedMesh* testmesh = smgr->getMesh("media/test.3ds");
scene::IAnimatedMeshSceneNode* test = smgr->addAnimatedMeshSceneNode(
testmesh );
test->setMaterialFlag(video::EMF_LIGHTING, false);
test->setMaterialFlag(video::EMF_FOG_ENABLE, true);
cout << "create test scene node complete! \n";
In diesem Teil habe ich das Licht initialisiert, denn ohne Licht wäre das gesamte Bild später
schwarz. Dann haben wir noch eine Test Scene Node eingefügt, einfach, damit man sieht, ob es geht.
Und sonst kommen wir nun zum Terrain:
Teil 3: Tiled Terrain
Für unser Terrain haben wir uns der Node von arras bedient, aber einiges geändert.
Da für die Node selbst so gut wie keine Dokumentation besteht, werde ich auf die wichtigsten Aspekte genau eingehen.
ShTlTerrainSceneNode* terrain = new ShTlTerrainSceneNode(smgr, terrainWidth, terrainHeight, tileSize, meshSize);
terrain->drop();
Nun schreibe ich also die eigentliche Terrain Node. Wie man sieht, ist terrain
nun Teil der Klasse ShTlTerrainSceneNode. Als Argumente übergibt man die zuvor gesetzten
Attribute des Terrains.
Um die Node im einzelnen zu verstehen, empfiehlt es sich dringend ShTlTerrainSceneNode.cpp durchzuarbeiten.
terrain->setMaterialFlag(video::EMF_LIGHTING, true);
terrain->setMaterialFlag(video::EMF_FOG_ENABLE, true);
terrain->setPosition(terrainPos);
cout << "setup terrain scene node complete! \n";
// set terrain to render around camera
terrain->follow(camera.getNode());
Hier werden, wie bei einem normalen Terrain, die Eigenschaften für den Treiber übergeben.
Danach wird bestimmt, wo der Ursprung des Terrains liegen soll.
Schließlich noch, wie bereits angedeutet, wird die Position der Kamera ausgelesen, so dass
das Terrain um die aktuelle Position herum gerendert werden kann.
Somit ist natürlich die maximale Größe des Terrains nicht mehr beschränkt.
Da wir aber zuvor zu allen Punkten noch eine Höhe berechnen mussten, waren wir wegen der Laufzeit
gezwungen das Gebiet zu beschränken.
makeHills(terrain, buffer16, terrainWidth, terrainHeight);
free(buffer16);
free(water);
Hier wird das Terrain errechnet. Um den Aufruf zu verstehen, zeige ich den entsprechenden Teil
von SomeFunctions.h:
#include <irrlicht.h>
using namespace irr;
#include"ShTlTerrainSceneNode.h"
#include"random.h"
void makeHills(ShTlTerrainSceneNode* node, uint16* buffer16, s32
terrainWidth, s32 terrainHeight)
{
// make hills
for(s32 j=0; j<terrainHeight; j++)
{
for(s32 i=0; i<terrainWidth; i++)
{
int n=(int)(j*terrainWidth+i);
node->setHeight(i, j, (f32)buffer16[n]/128);
}
}
}
Wie man sieht steckt nicht viel hinter der Funktion. Nachdem die Höhenmatrix berechnet ist,
muss man dem Programm nur noch zu jeder Koordniate die richtige Höhe via SetHeight() übergeben.
Hier gehen wir, genau wie beim Beschreiben von buffer16[] wieder zeilenweise vor.
terrain->smoothNormals();
In diesem Schritt wird das Gelände ein wenig abgerundet.
randomizeColor(terrain);
randomizeUV(terrain);
Diese beiden Schritte lassen das Terrain wesentlich realistischer aussehen. randomizeColor() gibt dem Terrain ein zufällige Farbe,
abhängig von der Höhe und randomizeUV() erstellt eine zufällige Anordung der UV-Vektoren, was gleichzeitig Texturen zufällig verteilt.
Man kann dem Terrain beliebig viele Texturen übergeben und diese werden dann zufällig verteilt.
terrain->setMaterialTexture(1, driver->getTexture("media/dirt_x_43.bmp"));
driver->beginScene(true, true, video::SColor(255,100,101,140));
guienv->drawAll();
driver->endScene();
// movement speed per second
f32 speed = 10.0f * tileSize;
// time
f32 time = 0;
f32 oldtime;
// time between frames
f32 deltaT;
wchar_t tmp[1024];
bool help = false;
guienv->clear();
Als letztes wird nur noch die Detailmap, die Bewegungsgeschwindigkeit geschrieben. Außerdem
brauchen wir, um später die FPS angeben zu können noch ein paar Variablen.
Teil 4: Wasserflächen
Um das Terrain realistischer wirken zu lassen, haben wir überall dort, wo in Realität auch
Wasserflächen sind, Wasser gesetzt. Im Code sieht das ganze wie folgt aus:
//add animated water
scene::IAnimatedMesh* mesh1 = smgr->addHillPlaneMesh("water1#",
core::dimension2d<f32>(50,50),
core::dimension2d<u32>(20,10), 0, 0, //Größe (1000,500)
core::dimension2d<f32>(0,0),
core::dimension2d<f32>(20,20));
scene::ISceneNode* node1 = smgr->addWaterSurfaceSceneNode(mesh1->getMesh(0),
0.25f, 300.0f, 0.75f);
node1->setPosition(core::vector3df(1085,9.25f,1040)); //Mittelpunkt
node1->setMaterialTexture(0, driver->getTexture("Media/water_refl.jpg"));
node1->setMaterialTexture(1, driver->getTexture("Media/water.jpg"));
node1->setMaterialType(video::EMT_REFLECTION_2_LAYER);
node1->setMaterialFlag(video::EMF_FOG_ENABLE, true);
Wir haben zwar mehrere water meshes hinzugefügt, da aber alle genau gleich funktionieren, erkläre ich nur das erste.
Zuerst erschaffen wir ein leeres, flaches, animiertes Mesh, dem man dann noch Eigenschaften
zuordnet. Zuallererst den Namen, den das Mesh später trägt. Die nächsten beiden
Argumente ergeben zusammen die Größe des Meshs. Zuerst legt man die tileSize in x- und
y-Richtung fest. Danach gibt man an, wie oft die Tiles in x- und y-Richtung jeweils wiederholt
werden soll, also den tileCount. Insgesamt kann man dann die Größe des Meshs in jede
Richtung ausrechnen, indem man tileSize * tileCount rechnet.
Nun könnte man noch das Material und die Hügelhöhe ändern, aber wir wollen
ja ein leeres, flaches Mesh und lassen somit diese Werte auf NULL.
Das nächste Argument gibt die Anzahl an Hügeln an, die natürlich NULL sein
soll. Schließlich legt man noch fest, wie oft die Textur in jede Richtung wiederholt werden soll,
dies ist später der entscheidende Faktor für die Ressourcenaufwändigkeit
des Wassers.
Nachdem wir nun ein leeres Mesh haben, wollen wir daraus natürlich noch Wasser machen.
Dies tun wir in den nächsten Schritten. addWaterSurfaceSceneNode hat hierfür acht
Argumente, von denen wir allerdings nur vier vom Standartwert her ändern.
Das Erste besagt, welches Mesh zu Wasser animiert werden soll. Wir wählen hier natürlich
unser soeben erstelltes mesh1. Zweitens sagen wir, wie hoch die Wellen sein sollen, da wir kein
Meer oder Ähnliches erstellen wollen, haben wir diese sehr niedrig gewählt. Nun folgen zwei
weitere Argumente für die Wellen. Zuerst die Geschwindigkeit (niedrigere Zahl = höhere Geschwindigkeit)
und dann die Länge der Wellen. Die letzten Argumente wären parent, id, position, rotation und scale
diese ändern wir aber nicht.
Damit das Wasser schließlich an der gewollten Stelle ist, übergibt man nun noch den Mittelpunkt
des Meshs.
Nun bearbeitet man noch das Material, übergibt also die Texturen und die Eigenschaften.
Teil 5: Radar
Da wir ein so großes Terrain haben, haben wir uns entschlossen, zur besseren Orientierung ein Radar einzubauen,
Dies ist auch nicht weiter kompliziert, war aber schwerer als gedacht zu implementieren.
Zuerst wollte ich alles in die While(device->run) Schleife einbauen, was aber die FPS von 180
auf 6 gedrückt hat. Also mussten wir uns eine andere Lösung überlegen und die sieht wie folgt aus:
video::ITexture* dot=driver->getTexture("Media/dot.tga");
video::ITexture* map=driver->getTexture("Media/Map.jpg");
// Add Terrainradar
guienv->addImage(map,core::position2d<s32>(590,10));
//Map for radar
gui::IGUIElement* point=guienv->addImage(dot,core::position2d<s32>(590+100-2,10+100-2));
point;
while(device->run())
{...
Hier wird zuerst einmal die Karte und der Punkt in die Mitte der gesetzten Karte in das Fenster gelegt.
Dabei nimmt addImage() lediglich zwei Argumente und zwar die Textur des geladenen Bildes und die Position der oberen linken Ecke des Bildes also 2D-Vector.
Schließlich muss der Punkt sich nur noch genauso bewegen, wie es die Kamera tut:
point->setRelativePosition(core::rect<s32>(((s32)camera.getPosition().X/10)+590-2,210-((s32)camera.getPosition().Z/10)-2,((s32)camera.getPosition().X/10)+590+2,210-((s32)camera.getPosition().Z/10)+2));
}
Hierbei ist die eigene Kameraklasse wieder von Vorteil, da man die Position sehr einfach abfragen kann.
setRelativePosition() erwartet nur ein einziges Argument und zwar die neue Position als
Rechteck. Dies geschieht genauso wie immer, wenn man ein Rechteck angibt (obere linke Ecke und untere rechte).
Teil 6: Waternode und Scanline-Algorithmus
Zuletzt biete ich einen Nachtrag, da wir diesen Teil erst am Ende erstellt haben. Wie oben
erwähnt, wollten wir überall, wo in der Realität Wasser ist, auch in unserer
Simulation Wasser setzen. Hierfür bietet es sich an, noch einmal die Satellitendaten
zu verwenden. Das haben wir also auch gemacht:
In diesem Teil wird die Shapefile "Waterbody_Poly" gelesen, um die Lage des
Wassergeländes zu bestimmen.
Wir beginnen erstmal damit, die Shapedatei zu öffnen:
/* ################### Part 5: A ################### */
/* reading shapefiles 'Waterbody_Poly' */
cout << "reading Waterbody_Poly..." << endl;
startTime = clock();
shape=SHPOpen("WaterBody_Poly","rb");
SHPGetInfo(shape,&entities,&shptype,NULL,NULL);
cout << "Number of entities = " << entities << endl;
cout << "Shapetype: " << shptype << endl;
if( NULL == (water = (uint16*) malloc(pixelNumber*2)) )
{
fprintf(stderr, "Could not allocate enough memory for storing
water!\n");
exit(EXIT_FAILURE);
}
for(i=0;i<entities;i++) water[i]=0;
Hierzu wurde das Array
"water" eingerichtet. Jedes Element wird den Wert 0 oder 0xffff
speichern, je nachdem, ob sich an derjenigen Stelle Wasser befindet.
Nun kommen wir zu dem Scanline-Algorithmus:
Dieser Algorithmus wird
normalerweise verwendet, um ein Polygon zu füllen. Weitere Erklärungen
findet sich z.B. auf Wikipedia.de.
Das Polygon kann man hier als Wassergelände ansehen, und die
Frage, ob ein Punkt innerhalb des Polygons liegt (d.h. ob der gegebene
Pixel gefärbt werden soll), entspricht der Frage, ob sich an dieser Stelle
Wasser befindet.
Dazu wenden wir diesen
Algorithmus auf jedes einzelne Objekt an. Ein Objekt besteht aus einem
oder mehreren Polygonen. Im letzteren Fall besagt nParts die Anzahl der
Polygone. Das erste Polygon ist das größte Polygon des Objekts, die
anderen sind Polygone, die innerhalb des ersten Polygons liegen und somit
"Löcher" im Polygon bilden. Den Beginn des neuen Polygons innerhalb des
Objekts erkennt man an dem Array object->panPartStart[]. Die x- und y-Koordinaten
der Eckpunkte der Polygone werden in padfX[] bzw. padfY[] gespeichert.
Jedes Polygon in diesem Objekt beginnt und endet mit demselben Eckpunkt.
/* ################### Part 5: B ################### */
/* scanline algorithm */
cout << "applying scanline algorithm to each polygon... ";
for(i=0;i<entities;i++)
{
SHPObject* object=SHPReadObject(shape,i);
j=0;
minx=fx(object->dfXMin,min[0]); maxx=fx(object->dfXMax,min[0]);
miny=fy(object->dfYMax,max[1]); maxy=fy(object->dfYMin,max[1]);
// check if the polygon is inside the observed area.
if(miny <= length && maxy >= 0 && minx <= width && maxx >= 0)
Da wir uns auf das Tempelgebiet einschränken, können wir alle Polygone außerhalb
dieses Gebiets ausschließen, ansonsten wird der Scanline-Algorithmus verwendet.
{
if( NULL == (x = (double*) malloc((object->nVertices)*sizeof(double))))
{
fprintf(stderr, "Could not allocate enough memory for storing all
vertices!\n");
system("PAUSE");
exit(EXIT_FAILURE);
}
if( NULL == (y = (double*) malloc((object->nVertices)*sizeof(double))))
{
fprintf(stderr, "Could not allocate enough memory for storing all
vertices!\n");
system("PAUSE");
exit(EXIT_FAILURE);
}
for(count=0; count<object->nVertices; count++)
{
x[count]=fx(object->padfX[count],min[0]);
y[count]=fy(object->padfY[count],max[1]);
}
if((int)miny<0) beginy=0; else beginy=(int)miny;
if((int)minx<0) beginx=0; else beginx=(int)minx;
Die x- und y-Koordinaten aller Eckpunkte werden in dem Feld x[] bzw. y[]
gespeichert. Der bearbeitete Bereich für jedes einzelne Polygon ist gerade der
Durchschnitt vom Tempelbereich und vom Polygonbereich (daher die Variablen
beginx und beginy, und die untere Schleifen-Abbruchbedingung).
for(zeile=beginy; zeile<maxy+1 && zeile<length; zeile++) // Schleife
nach Y-Koord.
{
// Bestimme alle schnittpunkte der Zeile mit allen Kanten des Polygons.
if( NULL == (p = (double*) malloc((object->nVertices-object->nParts)*sizeof(double))))
{
fprintf(stderr, "Could not allocate enough memory for storing all
vertices!\n");
system("PAUSE");
exit(EXIT_FAILURE);
}
j=0; count=0;
for(k=0;k<object->nVertices-1;k++)
{
if(j<object->nParts-1 && k==object->panPartStart[j+1]-1) {j++;}
else if((y[k]>=zeile && y[k+1]<=zeile) || (y[k]<=zeile && y[k+1]>=zeile))
{
if(y[k]==zeile)
{
bool before, after;
if(k!=object->panPartStart[j]) before = (y[k-1]<zeile);
else if(j==object->nParts-1) before = (y[object->nVertices-2]<zeile);
else before = (y[object->panPartStart[j+1]-2]<zeile);
after = (y[k+1]>zeile);
if(before ^ after){ p[count]=x[k]; count++; }
}
else
{
p[count] = (zeile-y[k])*(x[k+1]-x[k])/(y[k+1]-y[k])+x[k];
count++;
}
}
}
qsort(p,count,sizeof(double),lessthan);
Nun kommen wir zum
Hauptschritt des Algorithmus. Zuerst sind die Schnittpunkte jeder
Bildzeile mit den Kanten des Polygons zu bestimmen. Dies wird
in das Feld p[] geschrieben. Von
Mathematik her ist ein Schnittpunkt gerade der von der Geraden y=zeile
und der Strecke mit den Eckpunkten (x[k],y[k]) und (x[k+1],y[k+1]). Dies
bedeutet, liegt zeile nicht zwischen y[k] und y[k+1],
so gibt es keinen Schnittpunkt der Bildzeile mit
der Kante. Ansonsten berechnet sich die x-Koordinate
des Schnittpunkts (y-Koordinate ist wegen y=zeile bekannt!) aus der
Formel (p[count]-x[k])/(zeile-y[k])=(x[k+1]-x[k])/(y[k+1]-y[k])
(die Kehrwerte der beiden Steigungen müssen gleich sein).
Allerdings sind noch ein paar Spezialfälle zu
behandeln, nämlich wo y[k]=zeile. Hier müssen wir genauer betrachten, ob
sich die Farbe der betrachteten Zeile an dieser Stelle ändern soll. Wird
beispielsweise dieser Schnittpunkt genau einmal gespeichert, so ändert
sich die Farbe an diesem Punkt. Wird dieser Schnittpunkt aber genau
zweimal gespeichert, so ändert sich die Farbe nicht(Genaueres wird später
erklärt). Danach werden alle Schnittpunkte sortiert.
// Dann alles berechnen
for(spalte=beginx; spalte<width && spalte<maxx+1; spalte++) // Schleife
nach X-Koord.
{
int left=0;
for(j=0; j<count; j++){ if(p[j]<=spalte) left++; else break; }
if(left%2 == 1) water[zeile*width+spalte]=0xffff;
}
free(p);
}
free(x); free(y);
SHPDestroyObject(object);
}
}
cout << "done\n";
SHPClose(shape);
Jetzt kommen wir zum Schluss des Scanline-Algorithmus. Für jeden Punkt auf
der Bildzeile wird abgezählt, wieviele Schnittpunkte mit allen Kanten des
Polygons links von ihm liegt. Ist die Anzahl solcher Punkte ungerade, so wird
dieser Punkt auf der Bildzeile gefärbt, d.h. er bekommt den Wert 0xffff
zugewiesen. Rein theoretisch könnte man hier auch den anderen Wert wie z.B.
1 zuweisen, aber der Wert 0xffff entspricht der Farbe weiß, wenn wir später
den "Watermap" erzeugen wollen.
/* ################### Part 5: C ################### */
/* optional: generating output 'watermap.tif' */
// Open file 'watermap.tif' for output
/* if((output = TIFFOpen("watermap.tif", "w")) == NULL)
{
fprintf(stderr, "Could not open outgoing watermap.tif\n");
exit(EXIT_FAILURE);
}
printf("writing watermap.tif ... ");
// Write the tiff tags to the file
TIFFSetField(output, TIFFTAG_IMAGEWIDTH, width);
TIFFSetField(output, TIFFTAG_IMAGELENGTH, length);
TIFFSetField(output, TIFFTAG_COMPRESSION, compression);
TIFFSetField(output, TIFFTAG_PLANARCONFIG, 1);
TIFFSetField(output, TIFFTAG_PHOTOMETRIC, PHOTOMETRIC_MINISWHITE);
TIFFSetField(output, TIFFTAG_BITSPERSAMPLE, 16);
TIFFSetField(output, TIFFTAG_SAMPLESPERPIXEL, 1);
// short and easy: write all the data into 'heightmap.tif'
if(TIFFWriteEncodedStrip(output, 0, water, pixelNumber*2 ) == 0)
{
fprintf(stderr, "Could not write image\n");
exit(42);
}
TIFFClose(output);
cout << "done\n";*/
endTime = clock();
printf("reading Waterbody_Poly and applying scanline algorithm... done:
%.2f seconds\n", (float)(endTime-startTime) / CLOCKS_PER_SEC);
prgEnd = clock();
printf("\ntotal runtime for reading both shapefiles: %.2f seconds\n",
(float)(prgEnd-prgStart) / CLOCKS_PER_SEC);
system("PAUSE");
In diesem Teil wird die entsprechende TIFF-Datei beschrieben, was aber
ausgeblendet wurde. Schließlich wird der Anwender informiert, wie lange es gedauert hat,
Waterbody_Poly auszulesen und den Scanline-Algorithmus darauf anzuwenden.
|
