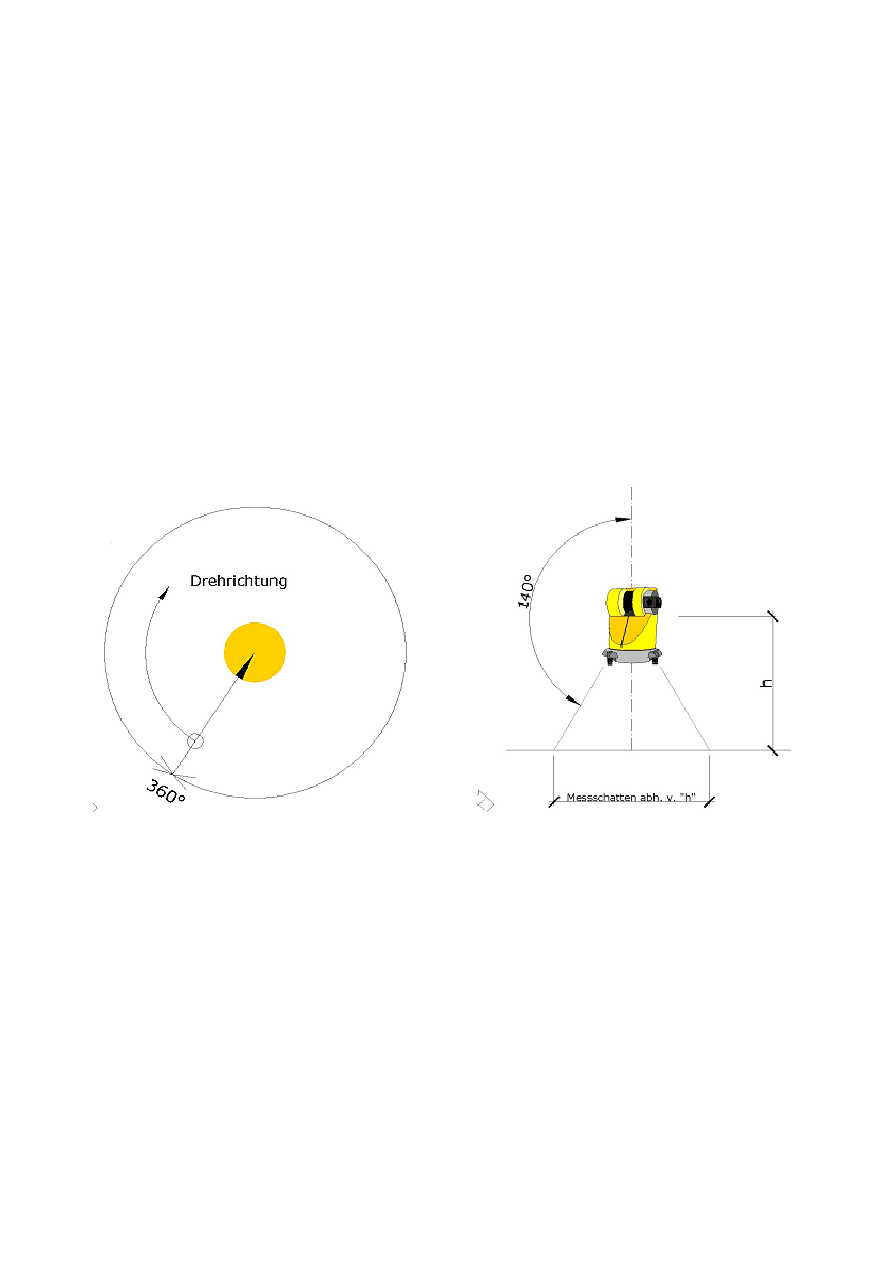
Während der Aufnahme rotiert der im Messkopf integrierte Laserscanner um 360° in der
horizontalen Ebene (einstellbare Schrittweiten: 0.0625°, 0.125°, 0.25°, 0.5°, 1.0°). Durch einen
rotierenden Drehspiegel wird der Laserstrahl in Form von vertikalen Streifen ausgesandt und kann
bis zu 140° seiner Umgebung in der vertikalen Ebene erfassen (Schrittweiten: 0.25°, 0.5°, 1.0°).
Hier ist der verschattete Bereich am Boden abhängig von der Installationshöhe des Scanners (siehe
Abb. 3). Dadurch, dass als Lichtquelle ein Infrarot-Laser benutzt wird, sind diese Messungen nicht
vom Umgebungslicht abhängig. [CAL]
Durch dieses Verfahren wird schließlich eine große Anzahl an Messpunkten aufgenommen, die die
Oberfläche des aufgenommenen Objekts approximieren. Eine solche Menge von Punkten in einem
Raum (in diesem Fall dreidimensional) wird im Allgemeinen auch als Punktwolke bezeichnet. Die
Genauigkeit einer solchen Punktwolke hängt von der Gesamtzahl der aufgenommenen Messpunkte
ab und somit auch von der Anzahl der durchgeführten Scans. Da ein solcher Scanner seine
Umgebung radial aufnimmt, sinkt die Punktdichte mit zunehmender Entfernung zum Scanner.
Aufgrund dieser Beschränkungen werden zumeist mehrere Aufnahmen von einem Objekt aus
unterschiedlichen Scannerpositionen durchgeführt, die im Nachhinein über einen in der
Scannersoftware integrierten Matching-Algorithmus zu einem Gesamtendatensatz zusammengefügt
werden.
Über eine in das System integrierte CCD-Kamera (mit variabler Brennweite) ist es möglich, sowohl
Panorama- als auch Detailaufnahmen der Umgebung aufzunehmen, um das gescannte Objekt
entsprechend zu dokumentieren. Diese Aufnahmen bieten außerdem eine Vorlage, um anschließend
automatisch den aufgenommenen Punktdaten RGB-Echtfarben zuweisen zu können. [CAL]
Zudem besitzt der Scanner einen integrierten Kompass und man kann so im Nachhinein allen
Messpunkten eine Himmelsrichtung zuweisen, in die eine Normale der zugehörigen Oberfläche
zeigen würde. Diese sogenannten Kompassfarben oder besser Richtungsfarben, werden aus den
XYZ Komponenten der "Punktnormalen" berechnet: Die Punktnormale eines Punktes wird unter
3
Abbildung 3: Drehwinkel des Scanners um die
horizontale Achse. [CAL]
Abbildung 2: Drehwinkel und Drehrichtung
des Scanners um dessen vertikale Achse.
[CAL]