2 Approximative Vermaschung von Punktwolken
Dem IWR der Universität Heidelberg liegen seit geraumer Zeit verschiedenste 3D-Laserscanner-
Aufnahmen vor. So wurden mit diesen Laserscannern z.B. zahlreiche Aufnahmen des Kirchenrests
des ,,Klosters Lorsch", dem ,,Heidelberger Fass" und der ,,Alten Brücke" in Heidelberg
vorgenommen. Diese Daten liegen im ASCII-Format (plain text und VRML) vor. Aufgrund der
Fülle von Messpunkten sind diese Daten sehr umfangreich (ca. 200-300 MByte) und lassen sich
demnach auch auf aktuellen Rechnern nur bedingt flüssig darstellen und bearbeiten. Die
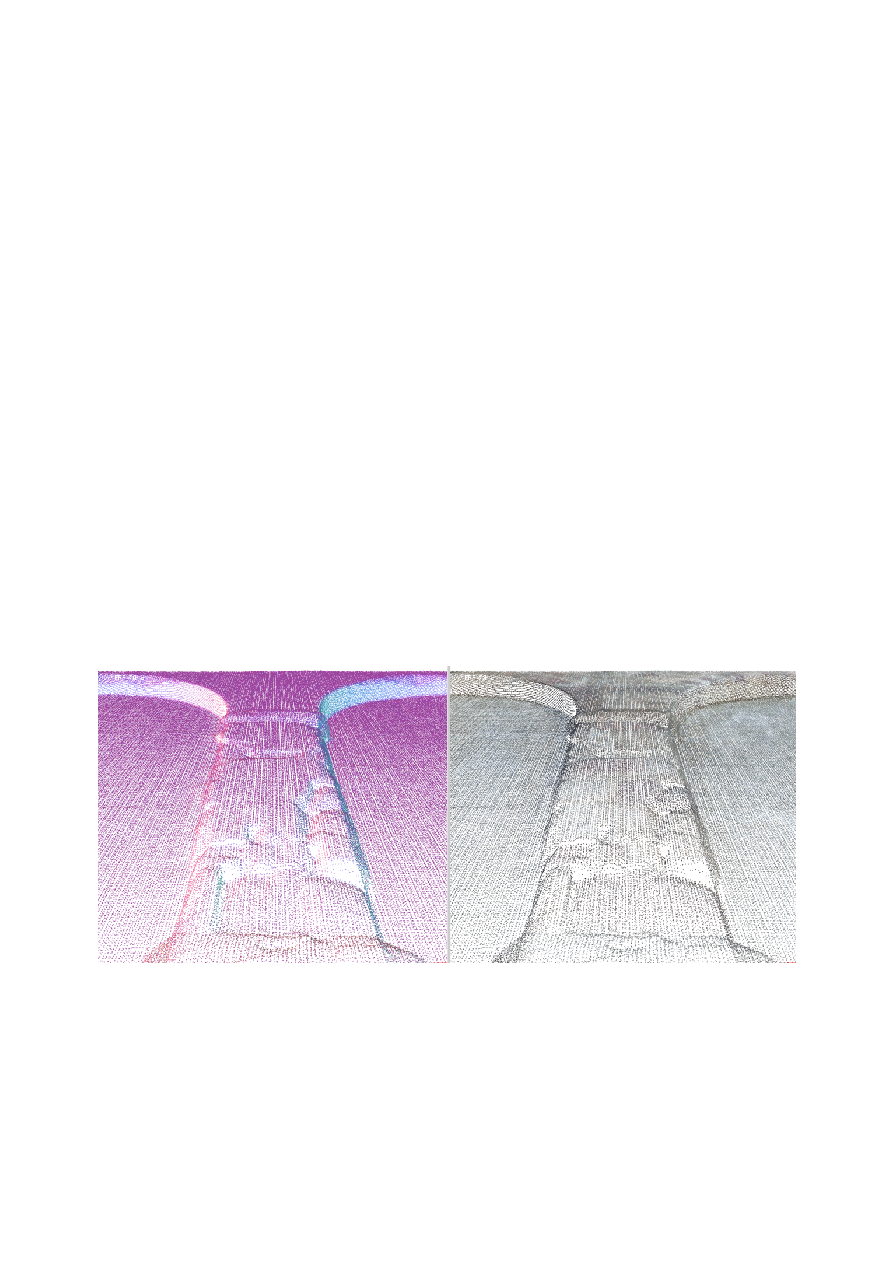
gespeicherten Punktwolken liegen sowohl in RGB-Echtfarben (aufgenommen über die
Digitalkamera des Laserscanners), als auch in Kompassfarben vor.
Zunächst werden diese Punktwolken mit einem Gitter (Mesh) approximiert. Diese automatisch
generierten Meshes bilden ein dichtes reguläres Gitter aus Quadraten, die die Oberfläche
approximieren. Im Rahmen meiner HiWi-Tätigkeit und eines Softwarepraktikums am IWR habe ich
bereits das Programm PointMesh entwickelt, das diese Approximation durchführt. [SWP_MESH]
Eine Einführung in den Aufbau und die Funktionsweise des Programms soll im folgenden Kapitel
gegeben werden.
Trotz der ansehnlichen Resultate ist es generell nicht sehr effizient, eine mehr oder weniger ebene
Oberfläche (Wand) mit tausenden von kleinen Quadraten bzw. Dreiecken darzustellen. Prinzipiell
würde hier ein Rechteck genügen und die Struktur der Oberfläche könnte man, wie in der 3D-
Grafik allgemein üblich, über eine Textur darstellen.
Durch die vorgenommene Approximation reduziert sich die Punktanzahl um den Faktor von zwei
bis zwanzig, je nach der vom Nutzer getroffenen Wahl der Maschenweite des Gitters. Um diesen
Detailverlust zu kompensieren, werden automatisch Texturen aus den RGB-Echtfarben der
Punktwolken gewonnen und auf das Gitter gelegt. [SWP_TEX]
5
Abbildung 4: Punktwolkenausschnitt eines 3D-Laserscans - links: Kompassfarben; rechts: RGB-Echtfarben