#include <module_robocom_linuxnqc.h>
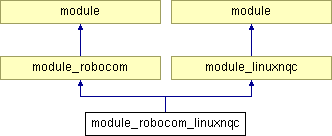
Klassendiagramm für module_robocom_linuxnqc:
Öffentliche Methoden | |
| module_robocom_linuxnqc () | |
| Konstruktor:. | |
| virtual int | get_status () |
| virtual char * | get_name () |
| virtual bool | anima () |
| Initialisiert den Roboter. | |
| virtual bool | anima (float &) |
| virtual bool | inanima () |
| Schaltet den Roboter ab. | |
| virtual bool | reanima () |
| Reaktiviert den Roboter. | |
| virtual bool | mitte_iussum (char *) |
| Sendet Befehl des gebotenen Namens. | |
| virtual bool | mitte_iussum (string) |
| Sendet Befehl des gebotenen Namens. | |
| virtual bool | mitte_iussum (int) |
| Sendet Befehl der gebotenen Nummer. | |
| bool | mitte_ordinem (string) |
| Sendet ein Programm. (Schneiderleinbefehl, nicht Basisprogramm). | |
| bool | mitte_ordinem (char *) |
| bool | obsequere_ordini () |
| Führt einen Schneiderleinbefehl aus. | |
| virtual int | ping () |
| Ping. | |
| virtual char * | accipe_nuntios () |
| Empfangene Information zurückgeben/Informationen zuvor empfangen. | |
| virtual string | accipe_nuntios (bool) |
Geschützte Methoden | |
| virtual int | mod_load () |
| virtual int | mod_unload () |
| virtual int | handle_msg (const char *) |
| bool | proba_npos (string::size_type, char *) |
| bool | permuta_horreum (string, bool renovatio=false) |
Geschützte Attribute | |
| string | via_nqc |
| string | turris |
| unsigned short | horreum_principale |
| int | status |
| module * | confunditor |
| Kompiliermodul. | |
| module * | lector |
| Dateilesemodul. | |
| ostringstream | exflumen_lit |
| Zur leichten Konvertierung int->string. | |
| istringstream | influmen_lit |
| Zur leichten Konvertierung string->int. | |
| fstream | flumen_dat |
| Zwischenspeicher fuer die nqc-Bildschirmausgabe. | |
| via_nqc | Pfad zum NQC-Programm | |
| turris | "-Susb" oder "" - USB- oder serieller IR-Turm. | |
| horreum_principalis | Programmspeicherplatz (auf dem RCX) fr das Hauptprogramm | |
| confunditor | Zugriff auf den Kompilierer | |
| lector | Zugriff auf den Dateileser |
| module_robocom_linuxnqc::module_robocom_linuxnqc | ( | ) |
Konstruktor:.
| string module_robocom_linuxnqc::accipe_nuntios | ( | bool | ) | [virtual] |
| char * module_robocom_linuxnqc::accipe_nuntios | ( | ) | [virtual] |
| virtual bool module_robocom_linuxnqc::anima | ( | float & | ) | [virtual] |
Initialisiert den Roboter und speichert seine Batteriespannung.
| bool module_robocom_linuxnqc::anima | ( | ) | [virtual] |
| char * module_robocom_linuxnqc::get_name | ( | ) | [virtual] |
Implementiert module_robocom.
| int module_robocom_linuxnqc::get_status | ( | ) | [virtual] |
Implementiert module_robocom.
| int module_robocom_linuxnqc::handle_msg | ( | const char * | ) | [protected, virtual] |
Implementiert module.
| bool module_robocom_linuxnqc::inanima | ( | ) | [virtual] |
| bool module_robocom_linuxnqc::mitte_iussum | ( | int | iussum | ) | [virtual] |
Sendet Befehl der gebotenen Nummer.
Sendet ein Signal an den Roboter - ohne in der Konfigurationsdatei zu prfen, ob es wirklich einen Befehl kodiert.
| bool module_robocom_linuxnqc::mitte_iussum | ( | string | ) | [virtual] |
Sendet Befehl des gebotenen Namens.
| bool module_robocom_linuxnqc::mitte_iussum | ( | char * | ) | [virtual] |
| bool module_robocom_linuxnqc::mitte_ordinem | ( | char * | ordo | ) |
Sendet einen Elementarbefehl. Noch nicht implementiert.
| bool module_robocom_linuxnqc::mitte_ordinem | ( | string | ) |
Sendet ein Programm. (Schneiderleinbefehl, nicht Basisprogramm).
| int module_robocom_linuxnqc::mod_load | ( | ) | [protected, virtual] |
Implementiert module.
| int module_robocom_linuxnqc::mod_unload | ( | ) | [protected, virtual] |
Implementiert module.
| bool module_robocom_linuxnqc::obsequere_ordini | ( | ) |
Führt einen Schneiderleinbefehl aus.
| bool module_robocom_linuxnqc::permuta_horreum | ( | string | , | |
| bool | renovatio = false | |||
| ) | [protected] |
Hilfsfunktion zur Steuerung des Wechsels des Roboterprogrammspeicherplatzes (nicht universell einsetzbar, da evtl. Programme auf dem Roboter gelöscht werden.)
| int module_robocom_linuxnqc::ping | ( | ) | [virtual] |
| bool module_robocom_linuxnqc::proba_npos | ( | string::size_type | , | |
| char * | ||||
| ) | [protected] |
| bool module_robocom_linuxnqc::reanima | ( | ) | [virtual] |
module* module_robocom_linuxnqc::confunditor [protected] |
Kompiliermodul.
ostringstream module_robocom_linuxnqc::exflumen_lit [protected] |
Zur leichten Konvertierung int->string.
fstream module_robocom_linuxnqc::flumen_dat [protected] |
Zwischenspeicher fuer die nqc-Bildschirmausgabe.
unsigned short module_robocom_linuxnqc::horreum_principale [protected] |
istringstream module_robocom_linuxnqc::influmen_lit [protected] |
Zur leichten Konvertierung string->int.
module* module_robocom_linuxnqc::lector [protected] |
Dateilesemodul.
int module_robocom_linuxnqc::status [protected] |
string module_robocom_linuxnqc::turris [protected] |
string module_robocom_linuxnqc::via_nqc [protected] |
 1.4.7
1.4.7