|
Kiretu
|
C++-class which represents a point-cloud of Microsoft's Kinect and allows the reconstruction of a point-cloud applying the steps explained at the documentation. More...
#include <KinectCloud.h>
Public Member Functions | |
| KinectCloud () | |
| Constructor of the KinectCloud-class. | |
| ~KinectCloud () | |
| Destructor of the KinectCloud-class. | |
| void | addZValues (int *zValues) |
| Adds the z-values of a Kinect depth-image grabbed by FrameGrabber and stores them as a point-cloud (std::vector< std::vector<float> >). | |
| void | addRgbValues (int *rgbValues) |
| Adds the RGB-values of a Kinect RGB-image grabbed by FrameGrabber and stores them as a point-cloud (std::vector< std::vector<float> >). | |
| void | rawToMeter () |
Converts the added depth-values of the Kinect (  ) into meter using the formula ) into meter using the formula
which was experimentaly determined (http://nicolas.burrus.name/index.php/Research/KinectCalibration). | |
| void | depthToCloud (std::vector< std::vector< float > > depthCam) |
Applies the intrinsic camera-parameters to the point-cloud. The parameters should be imported using YMLParser. With the help of these parameters, each point  of the depth-image with its depth-value of the depth-image with its depth-value  is projected on its equivalent point is projected on its equivalent point  in 3D-space regarding its z-value and the depth-camera-parameters. This is done with the following formula: in 3D-space regarding its z-value and the depth-camera-parameters. This is done with the following formula:
where | |
| void | applyExtrinsics (std::vector< std::vector< float > > rot, std::vector< float > trans) |
| Applies the extrinsic camera-parameters to the point-cloud. The parameters should be imported using YMLParser. This is done with a rotation and translation of each point:
where | |
| void | computeRgbMapping (std::vector< std::vector< float > > rgbCam) |
Computes the mapping between the point-cloud and the equivalent points of the RGB-image by reprojecting the point  of the point-cloud to its equivalent point of the point-cloud to its equivalent point  in the plane using the intrinsics of the RGB-camera imported by YMLParser. The projection is done with the following formula: in the plane using the intrinsics of the RGB-camera imported by YMLParser. The projection is done with the following formula:
| |
| std::vector< std::vector< float > > | getCloud () |
| Get the cloud. | |
| std::vector< std::vector< int > > | getCloudRgb () |
| Get the RGB-cloud. | |
| std::vector< std::vector< int > > | getCloudRgbMapping () |
| Get the cloud-RGB-mapping. | |
| std::vector< bool > | getValidValues () |
Get a vector which indicates if a point of the point-cloud is valid (  ). ). | |
| std::vector< bool > | getReconstructionSteps () |
| Get the reconstruction-steps. | |
Private Attributes | |
| std::vector< std::vector< float > > | cloud |
| std::vector< std::vector< int > > | cloudRgb |
| std::vector< std::vector< int > > | cloudRgbMapping |
| std::vector< bool > | validValues |
| std::vector< bool > | reconstructionSteps |
C++-class which represents a point-cloud of Microsoft's Kinect and allows the reconstruction of a point-cloud applying the steps explained at the documentation.
| KinectCloud::KinectCloud | ( | ) |
Constructor of the KinectCloud-class.
| KinectCloud::~KinectCloud | ( | ) |
Destructor of the KinectCloud-class.
| void KinectCloud::addRgbValues | ( | int * | rgbValues | ) |
Adds the RGB-values of a Kinect RGB-image grabbed by FrameGrabber and stores them as a point-cloud (std::vector< std::vector<float> >).
| rgbValues | Pointer to a  -dimensional array of RGB-values. -dimensional array of RGB-values. |
| void KinectCloud::addZValues | ( | int * | zValues | ) |
Adds the z-values of a Kinect depth-image grabbed by FrameGrabber and stores them as a point-cloud (std::vector< std::vector<float> >).
| zValues | Pointer to a -dimensional array of z-values. |
| void KinectCloud::applyExtrinsics | ( | std::vector< std::vector< float > > | rot, |
| std::vector< float > | trans | ||
| ) |
Applies the extrinsic camera-parameters to the point-cloud. The parameters should be imported using YMLParser. This is done with a rotation and translation of each point:
![\[ \begin{pmatrix} x_\mathrm{rgb} \\ y_\mathrm{rgb} \\ z_\mathrm{rgb} \end{pmatrix} = R \cdot \begin{pmatrix} x_\mathrm{d} \\ y_\mathrm{d} \\ z_\mathrm{d} \end{pmatrix} + T = \begin{pmatrix} r_{11} & r_{12} & r_{13} \\ r_{21} & r_{22} & r_{23} \\ r_{31} & r_{32} & r_{33} \end{pmatrix} \cdot \begin{pmatrix} x_\mathrm{d} \\ y_\mathrm{d} \\ z_\mathrm{d} \end{pmatrix} + \begin{pmatrix} t_1 \\ t_2 \\ t_3 \end{pmatrix}, \]](form_14.png)
where  and
and  are the extrinsic parameters of the Kinect and describe a rotation and translation.
are the extrinsic parameters of the Kinect and describe a rotation and translation.
Consider that the z-values should be converted into meters (rawToMeter()) before calling this function for a correct reconstruction.
| rot | Rotation-matrix (  ) of the Kinect as written in the specific yml-file and imported using YMLParser. ) of the Kinect as written in the specific yml-file and imported using YMLParser. |
| trans | Translation-vector (3-dimensional) of the Kinect as written in the specific yml-file and imported using YMLParser. |
| void KinectCloud::computeRgbMapping | ( | std::vector< std::vector< float > > | rgbCam | ) |
Computes the mapping between the point-cloud and the equivalent points of the RGB-image by reprojecting the point of the point-cloud to its equivalent point in the plane using the intrinsics of the RGB-camera imported by YMLParser. The projection is done with the following formula:
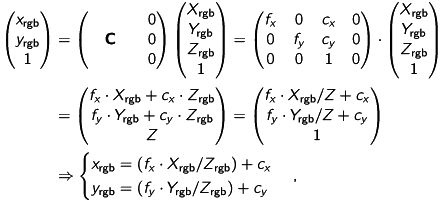
where  contains the intrinsic parameters of the RGB-camera.
contains the intrinsic parameters of the RGB-camera.
Consider that the depth-image needs to be projected into the 3D-space using (depthToCloud(std::vector< std::vector<float> > depthCam)) before calling this function for correct reconstruction.
| rgbCam | Intrisic parameters of the RGB-cam as a -matrix as written in the specific yml-file and imported using YMLParser. |
| void KinectCloud::depthToCloud | ( | std::vector< std::vector< float > > | depthCam | ) |
Applies the intrinsic camera-parameters to the point-cloud. The parameters should be imported using YMLParser. With the help of these parameters, each point of the depth-image with its depth-value is projected on its equivalent point in 3D-space regarding its z-value and the depth-camera-parameters. This is done with the following formula:
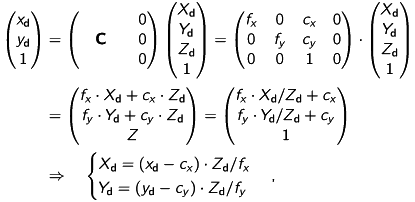
where  contains the intrinsic parameters of the depth-camera. Notice that the z-value doesn't change during this procedure and is already available at the depth-image.
contains the intrinsic parameters of the depth-camera. Notice that the z-value doesn't change during this procedure and is already available at the depth-image.
Consider that the extrinsic parameters should already be applied to the point-cloud (applyExtrinsics(std::vector< std::vector<float> > rot, std::vector<float> trans)) before calling this function.
| depthCam | Intrisic parameters of the depth-cam as a -matrix as written in the specific yml-file and imported using YMLParser. |
| std::vector< std::vector< float > > KinectCloud::getCloud | ( | ) |
Get the cloud.
| std::vector< std::vector< int > > KinectCloud::getCloudRgb | ( | ) |
Get the RGB-cloud.
| std::vector< std::vector< int > > KinectCloud::getCloudRgbMapping | ( | ) |
Get the cloud-RGB-mapping.
| std::vector< bool > KinectCloud::getReconstructionSteps | ( | ) |
Get the reconstruction-steps.
recon indicate: recon[0]: Raw depth-values of the Kinect converted into meters using rawToMeter(). recon[1]: The intrinsic parameters of the depth-camera were applied using depthToCloud(std::vector< std::vector<float> > depthCam). recon[2]: The extrinsic camera-parameters were applied using applyExtrinsics(std::vector< std::vector<float> > rot, std::vector<float> trans). recon[3]: The intrinsic parameters of the RGB-camera were applied using computeRgbMapping(std::vector< std::vector<float> > rgbCam). recon[4]: Normals were reconstructed using computeNormals() – not implemented yet.) | std::vector< bool > KinectCloud::getValidValues | ( | ) |
Get a vector which indicates if a point of the point-cloud is valid ( ).
points if it is valid ( ). | void KinectCloud::rawToMeter | ( | ) |
Converts the added depth-values of the Kinect ( ) into meter using the formula
![\[ Z_\mathrm{meter} = \frac{1}{Z_\mathrm{raw} \cdot (-0.0030711016) + 3.3309495161}, \]](form_7.png)
which was experimentaly determined (http://nicolas.burrus.name/index.php/Research/KinectCalibration).
Consider that the z-values must be added (addZValues(int* zValues)) before before calling this function.
std::vector< std::vector<float> > KinectCloud::cloud [private] |
The point-cloud
std::vector< std::vector<int> > KinectCloud::cloudRgb [private] |
The RGB-values
std::vector< std::vector<int> > KinectCloud::cloudRgbMapping [private] |
Coordinates of a point's corresponding color at the RGB-image
std::vector<bool> KinectCloud::reconstructionSteps [private] |
Reconstruction flags
std::vector<bool> KinectCloud::validValues [private] |
Valid flags for each point
 Generated on Sat Jan 28 2012 13:51:49 for Kiretu by version 1.7.3 of
Generated on Sat Jan 28 2012 13:51:49 for Kiretu by version 1.7.3 of


