| |
|
|

Kapitelle befinden sich auf dem oberen Ende von Säulen und ähnlichen vertikalen Bauelementen, wie rechts zu sehen. Sie sollen einen optisch ansprechenden Übergang von der runden Säule zu einer rechteckigen Deckenplatte schaffen.
Häufig sind neben floralen Motiven Tiergestalten oder Voluten zu sehen.
Die Kapitelle am Kloster in Lorsch
Die Fassade der Königshalle oder Torhalle wird an Ost- und Westseite von jeweils vier Kapitellen geziert.
Die Kapitelle wurden mit großer Wahrscheinlichkeit nicht eigens zum Schmuck des Klosters gefertigt, sondern stammen aus einer derzeit unbekannten Quelle. Es wurde vermutet, dass es sich bei den insgesamt acht Werkstücken ursprünglich um vier Kapitelle gehandelt haben muss, die von oben nach unten zersägt worden waren. Diese Vermutung konnte mithilfe der digitalen Modelle bestätigt werden.
Die Aufnahmen der Kapitelle wurden erstellt, als sie im Zuge von Renovierungsarbeiten ausgebaut worden waren.
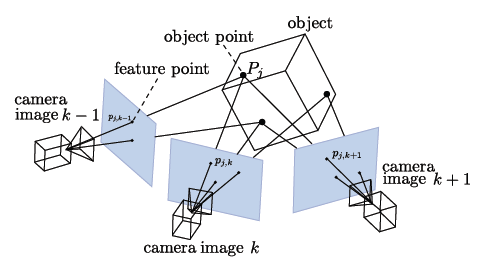
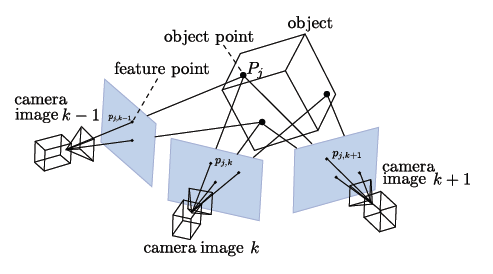 Die Photogrammetrie bedient sich einer großen Zahl an Fotos eines Objektes, um daraus ein 3D-Modell zu errechnen, wie nebenstehend schematisch dargestellt.
Die Photogrammetrie bedient sich einer großen Zahl an Fotos eines Objektes, um daraus ein 3D-Modell zu errechnen, wie nebenstehend schematisch dargestellt.
Es ist wichtig, dass die Bildbereiche der einzelnen Aufnahmen sich möglichst weit überlappen und sie die gesamte Modelloberfläche abbilden, um Löcher zu vermieden. Des Weiteren müssen einige Faktoren, wie beispielsweise die von der Kamera erzeugte Krümmung, berücksichtigt werden, um eine verzerrungsfreie Darstellung zu gewährleisten.
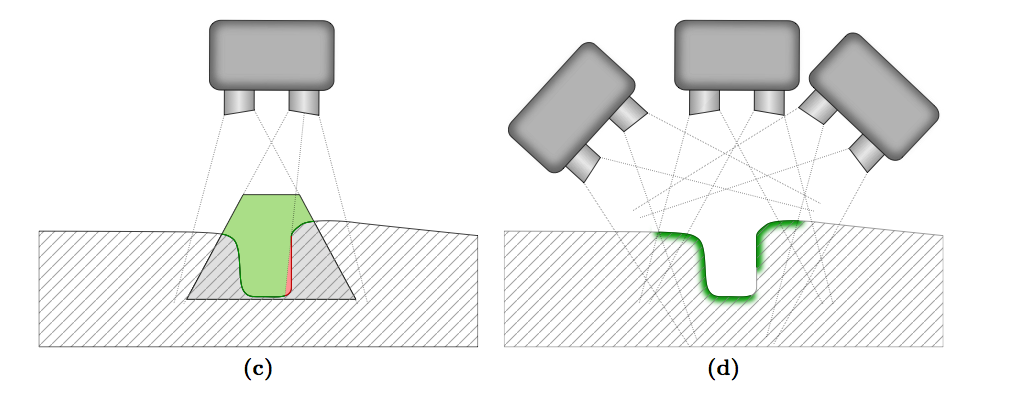
Beim Streifenlicht-Scan werden Lichtstreifen verschiedener Breiten auf das zu erfassende Objekt projiziert.
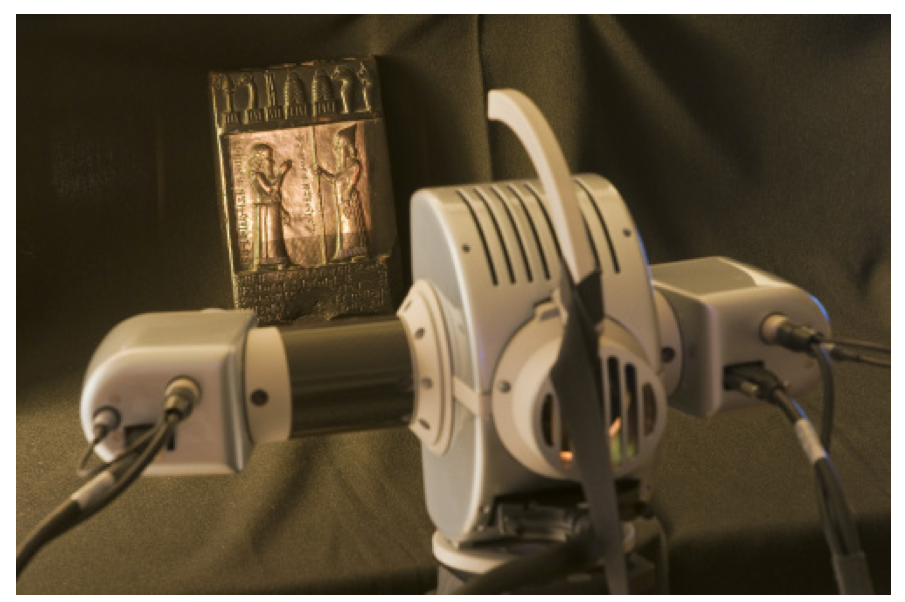
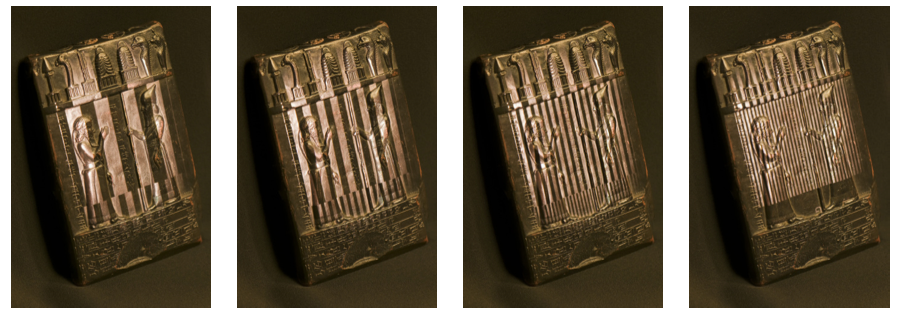
Zwei neben dem Projektor sitzende Kameras erfassen das Streifenmuster. Um eine genaue Abbildung der Oberfläche zu erreichen, werden die Streifen zunehmend verfeinert, wie oben zu sehen ist.
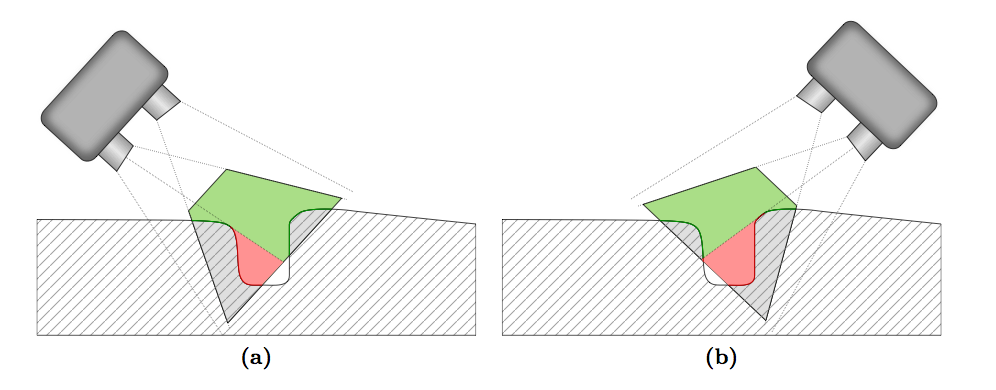
Ein Punkt im Mesh muss von beiden Kameras erfasst worden sein. Daher sind eine entsprechende Auflösung und geschickte Kameraposition Voraussetzung für ein lochfreies Modell.
Die Grafiken im Abschnitt "Streifenlicht-Scan" stammen aus der Dissertation von Hubert Mara.
Für die gegebene Aufgabenstellung war ein Distanzmaß interessant, welches eine Aussage über die Unterschiedlichkeit zweier Meshes erlaubt. Hierfür bot sich die Hausdorff-Distanz an.
Sie ist definiert als:

mit:

Dabei sind A, B und K nichtleere kompakte Teilmengen eines Raumes E, d ist seine Metrik. (Vergleiche Wikipedia.) Im gegebenen Fall sind A und B zwei Meshes, E der R³ und d die euklidische Metrik.
D(x,K) bestimmt die Abstände eines Punktes x zu allen Punkten aus K und gibt deren Minimum zurück. Im Mesh findet D(x,K) analog dazu den Punkt in Mesh K, welcher x am nächsten liegt.
In δ wird D auf jeden Punkt a in Mesh A im Hinblick auf Mesh B angewandet und umgekehrt. Es wird das Maximum gebildet, welches als Hausdorff-Distanz ausgegeben wird.
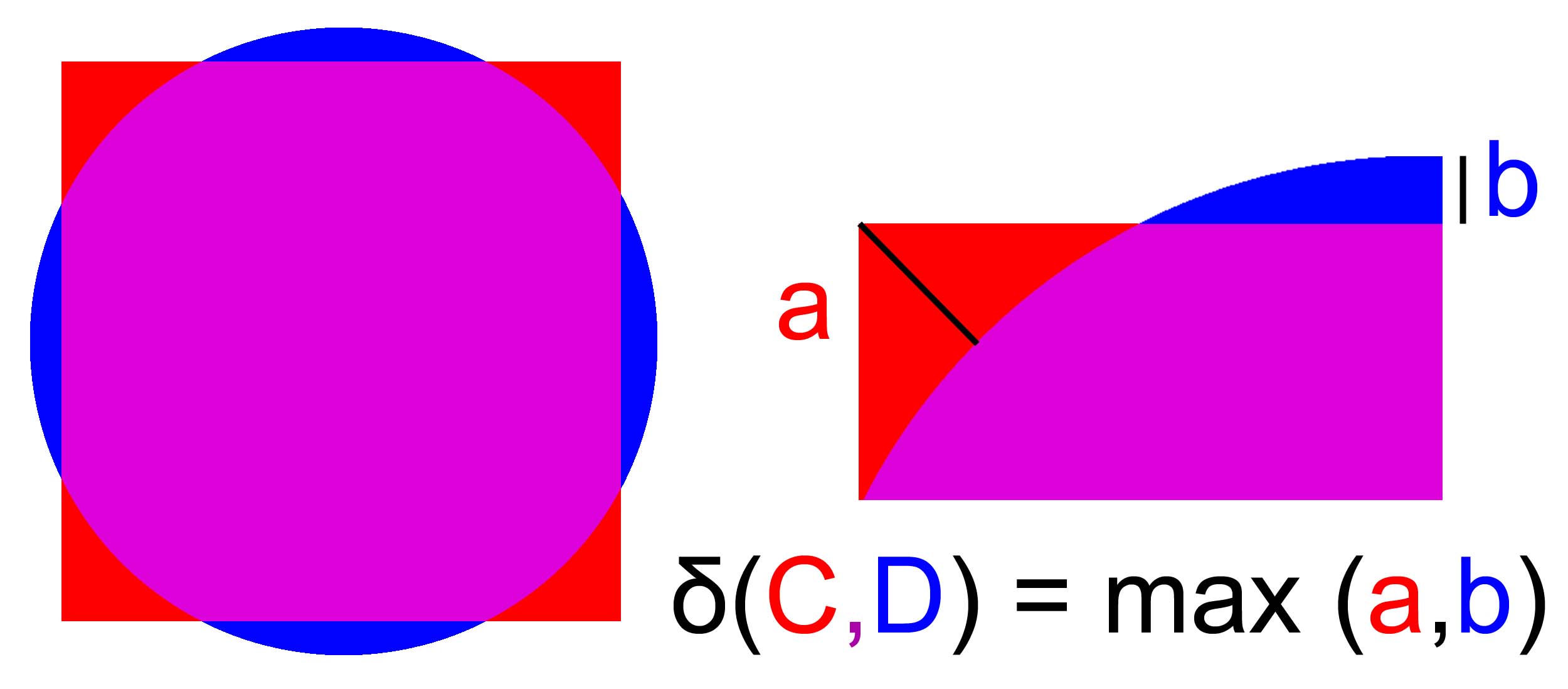
Auf dem nebenstehenden Bild ist zu erkennen, dass b der maximale kleinste Abstand vom Kreis zum Quadrat ist - anschaulich die Distanz an der Stelle, an der die Figuren am Weitesten voneinander entfernt sind. Interessanterweise ist dieser Abstand kleiner als der entsprechende Abstand vom Quadrat zum Kreis a. Die Hausdorff-Distanz wird also erst durch die äußere Maximumsfunktion symmetrisch.
Da für die Hausdorff-Distanz nur der nächste Nachbar eines Punktes im jeweils anderen Mesh interessant ist, kann die Laufzeit von O(n²) der naiven Implementierung vermieden werden, indem eine räumliche Baumstruktur verwendet wird. Hierfür erschien der KD-Baum am geeignetsten.
Ein KD-Baum lässt sich in O(n log n) aufbauen und ermöglicht einen Zugriff auf gesuchte Nachbarn in O(log n) im average case.
 Der Aufbau eines KD-Baums erfolgt durch die wiederholte Unterteilung einer Punktmenge entlang der Koordinatenachsen, bis keine weitere Aufteilung mehr möglich ist.
Der Aufbau eines KD-Baums erfolgt durch die wiederholte Unterteilung einer Punktmenge entlang der Koordinatenachsen, bis keine weitere Aufteilung mehr möglich ist.
Im ersten Bild wird die Punktwolke entlang der x-Achse so aufgeteilt, dass zwei gleich große Teile entstehen. Der Wert, an dem die Teilung erfolgte, wird im entsprechenden Knoten des Baums gespeichert. Nun wird jede Hälfte entlang der y-Achse aufgeteilt und der Wert erneut festgehalten. Somit die beiden im Zweidimensionalen vorhandenen Achsen abgearbeitet sind, wird mit der Teilung von Vorne begonnen - im dritten Schritt wird wieder entlang der x-Achse geteilt. Die Teilung wird fortgesetzt, bis nur noch ein Punkt je Zelle vorhanden ist. (Bildquelle)
Was im Zweidimensionalen anschaulich gezeigt werden kann, funktioniert auch in höheren Dimensionen - auch dort wird solange zyklisch entlang der Achsen geteilt, bis nur noch Punkte vorliegen.
Die Suche nach einem nächsten Nachbarn zu Punkt p gestaltet sich wie das Einfügen des Punktes in den anderen Baum: Ist der x-Wert von p größer oder kleiner als der x-Wert in der Wurzel? Steige in die entsprechende Richtung ab. Ist der y-Wert von p größer oder kleiner als der y-Wert im aktuellen Knoten? Steige in die entsprechende Richtung ab - und so fort. Der Punkt im auf diese Art erreichten Blattknoten wird als nächster Nachbar zurückgegeben.
Zurück - Nach oben - Weiter
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}