|
 |
 |
 |
|
|


Advanced Software Practical
|
| |
|
Conclusion
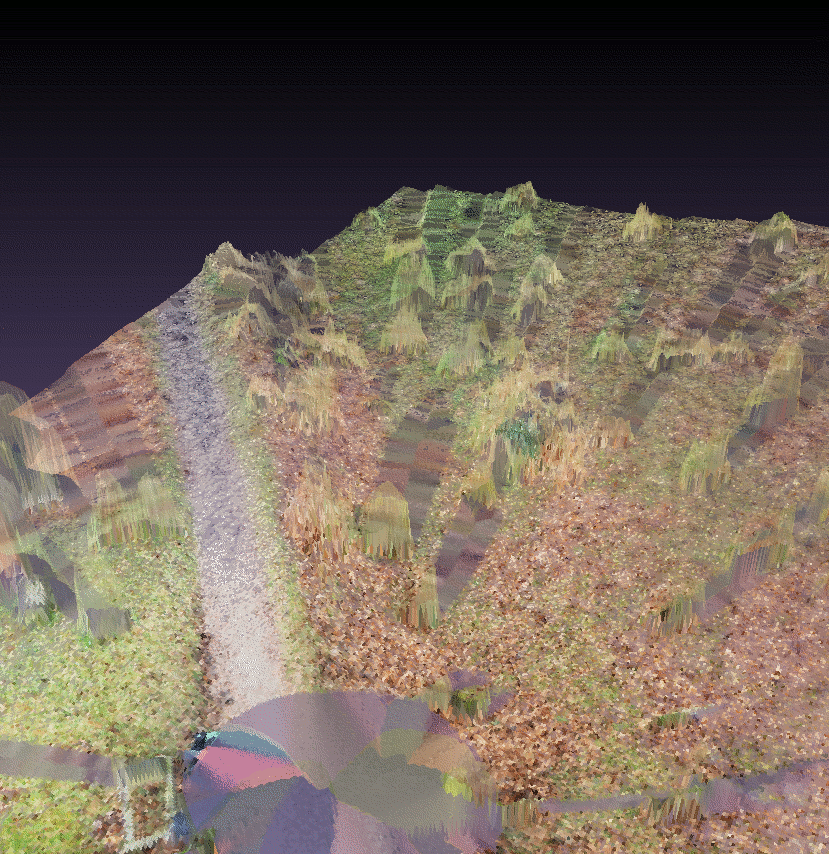
Our code was implemented in PointMesh, a program grown from one of our previous practicals. It was basically written to display and mesh 3D Clouds. We added some improvements on it:
Further implemented functions

- Meshing Algorithm
- much better quality - not to mention an enormous improvement of the running time could be achieved thanks to the implementation of the KD-tree.
- choice of a transparent display of the interpolated regions (bottom right picture)
- undelete and masking function to prevent deletion of specific regions of the pointcloud (Bounding Box)
- processing of G-Zip compressed VRML-Data files (.wrz) and Pointclouds
(compression factor ~ 6 -10 )
Improvement Potential
- usage of another variance
- e.g. root mean square deviation, standard deviation, range
- calculate the center of mass of the vertices
- consideration of the scanning position
- a function using the distance and angle of a point
- projections
- normals of virtual, local aligned planes
- cut along approximate gradient instead of horizontally
- approximated plane at points of a subcell and
calculate the normals of all subcells inside a cell
- normals inhomogeneous -> foilage
- normals homogeneous -> surface
Acknowledgements
We would like to thank Markus Forbriger and the Group of Prof. Dr. Bernhard Eitel at the Geographic Institute at Heidelberg University,
for providing us the scanning data and software of the Riegl VZ-400 scanner.
|
|
 |
 |
 |
 |
|